Power Electronics
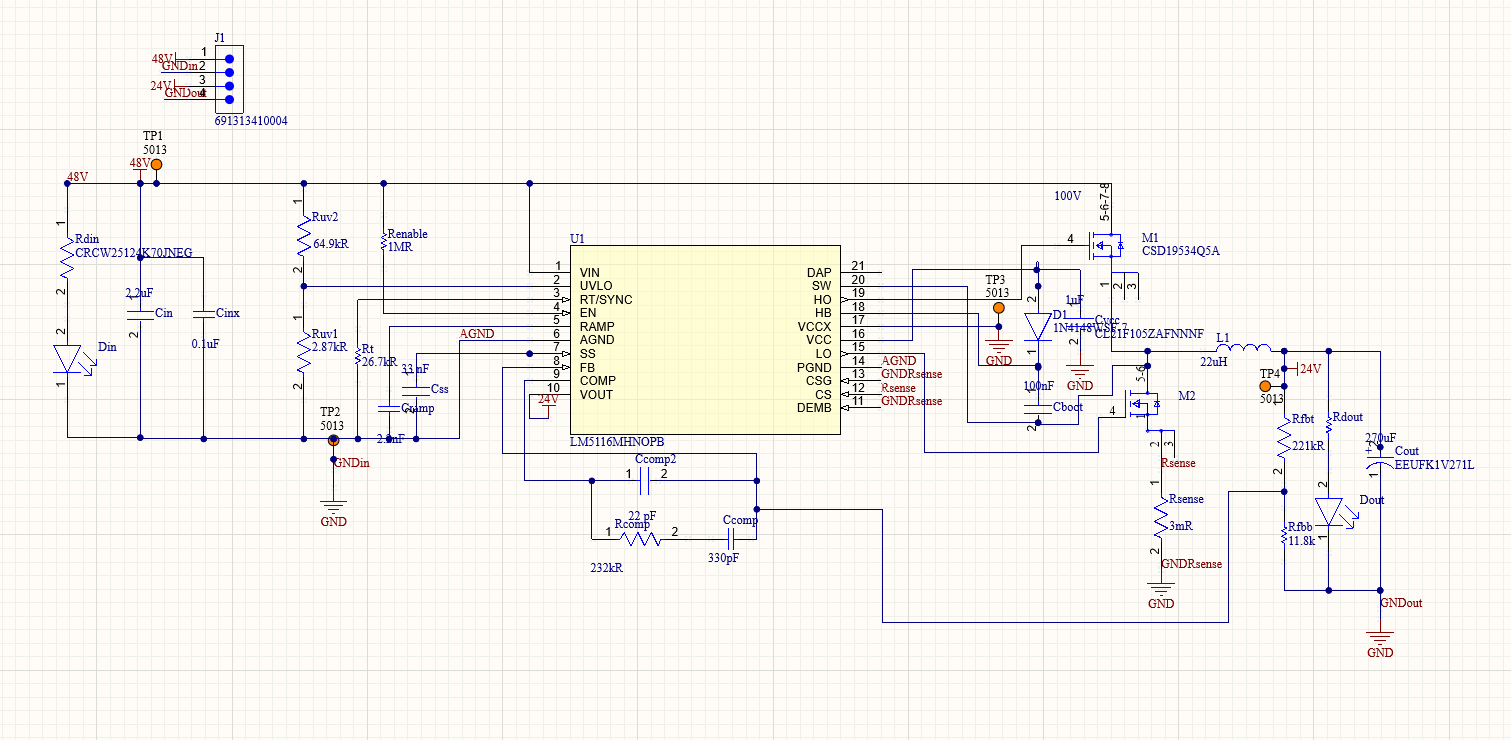
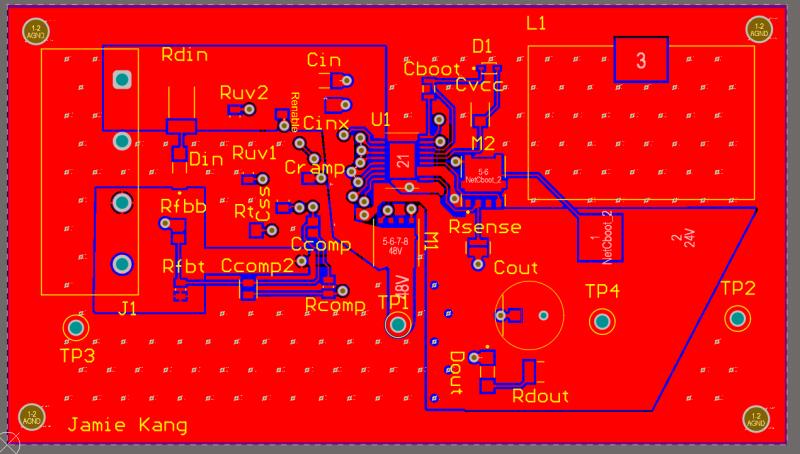
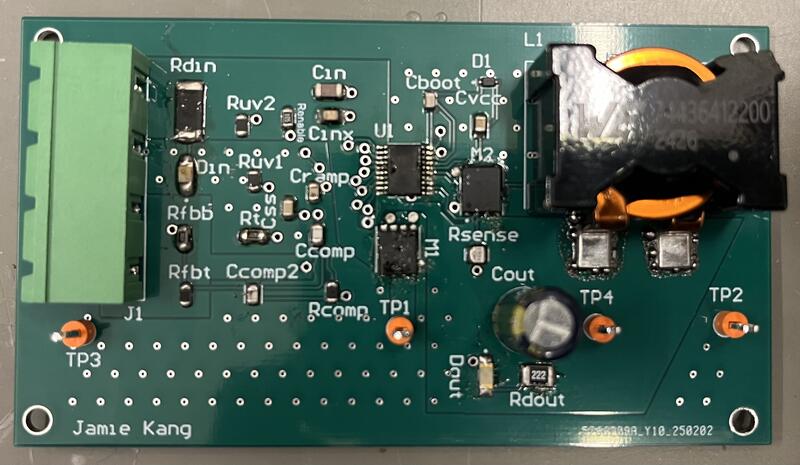
48V → 24V Buck Converter PCB (TI LM5116)
High‑current DC/DC with thermal relief and efficiency tests for robotics distribution.
- Altium
- LM5116
- Oscilloscope
- Load step
Vancouver, BC • Open to relocating • Co‑op/Internship (2025–2026) • Power • Embedded • Hardware
Clear communication, collaborative teams, and creative problem solving
Power Electronics
High‑current DC/DC with thermal relief and efficiency tests for robotics distribution.
Digital / FPGA
Custom accelerators (DMA/dot‑product), Avalon interface, SDRAM + VGA, and testbench automation.
Audio / Embedded
Custom Class‑AB amplifier with preamp, tone control, and ESP32 Bluetooth audio + controls.
Robotics
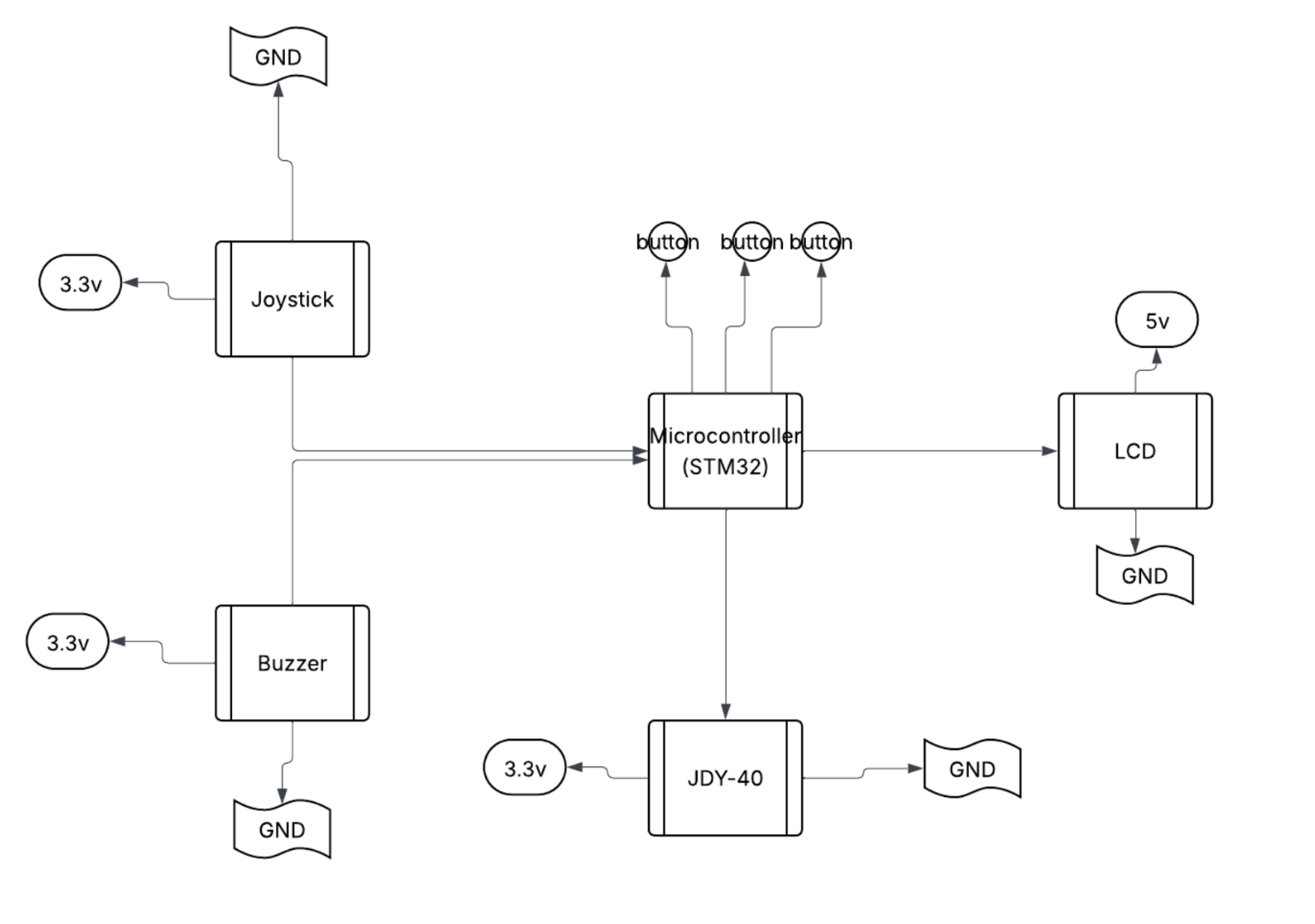
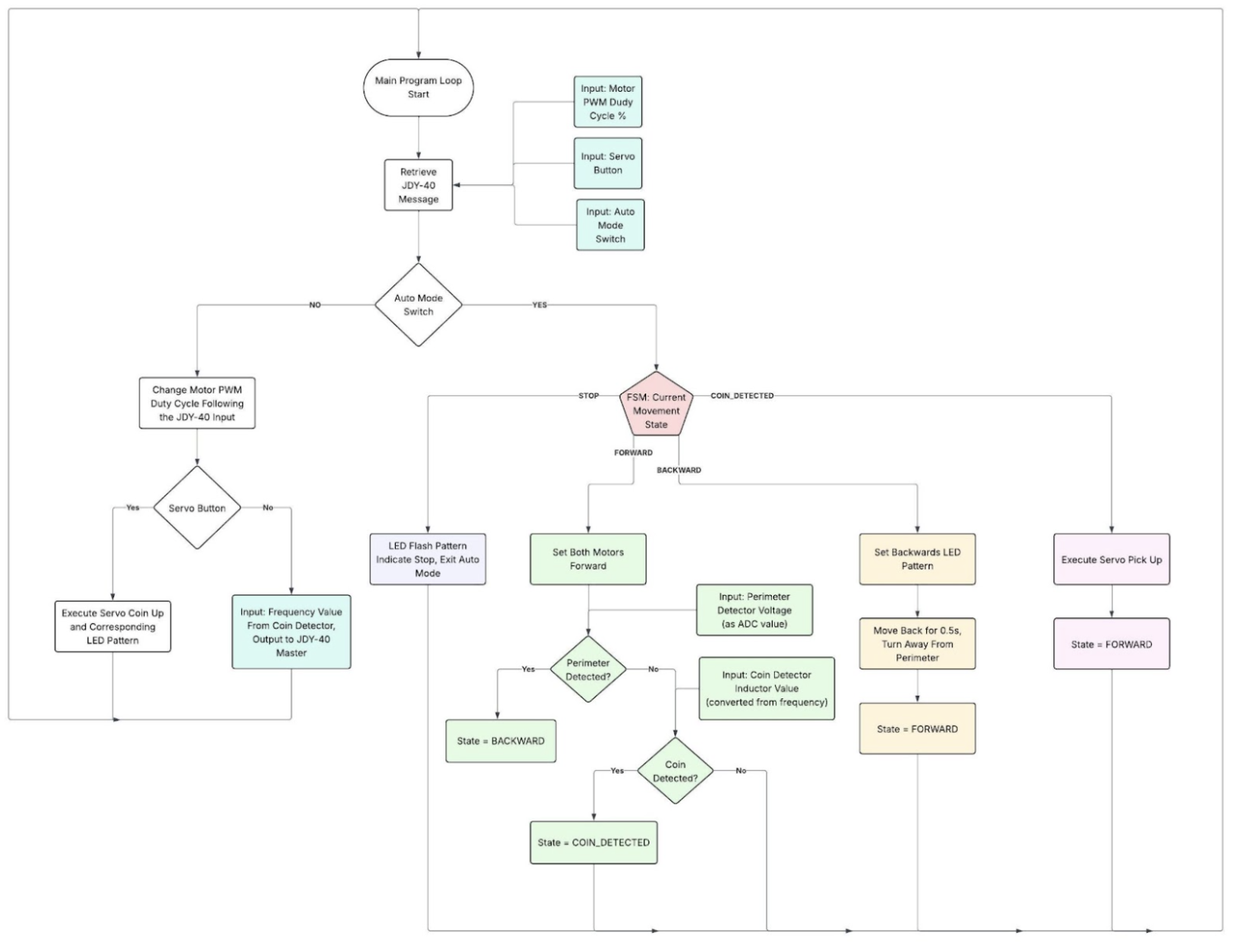
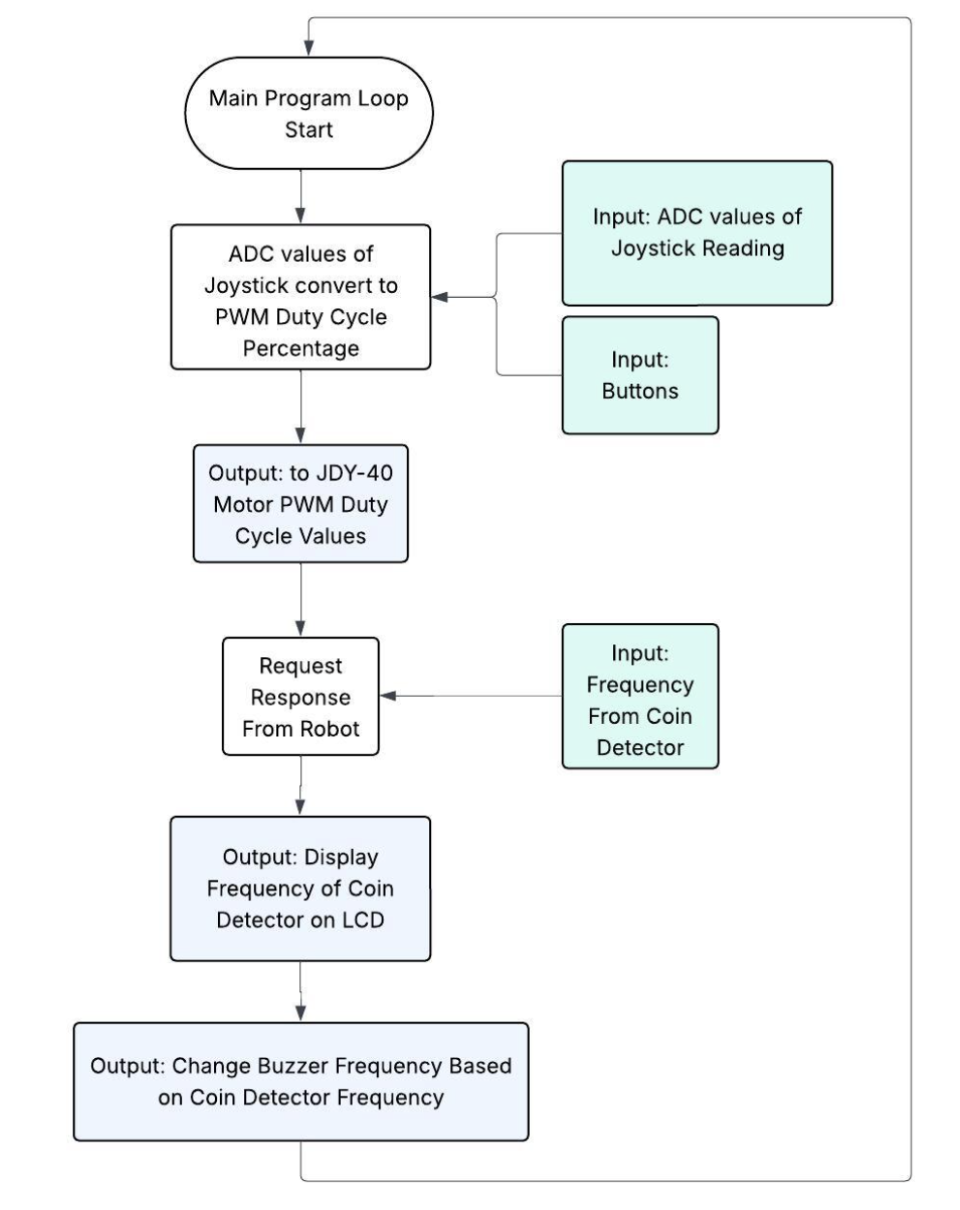
PIC32‑based autonomous robot with metal‑detector frontend and dual MG90S servos; <2% miss rate.
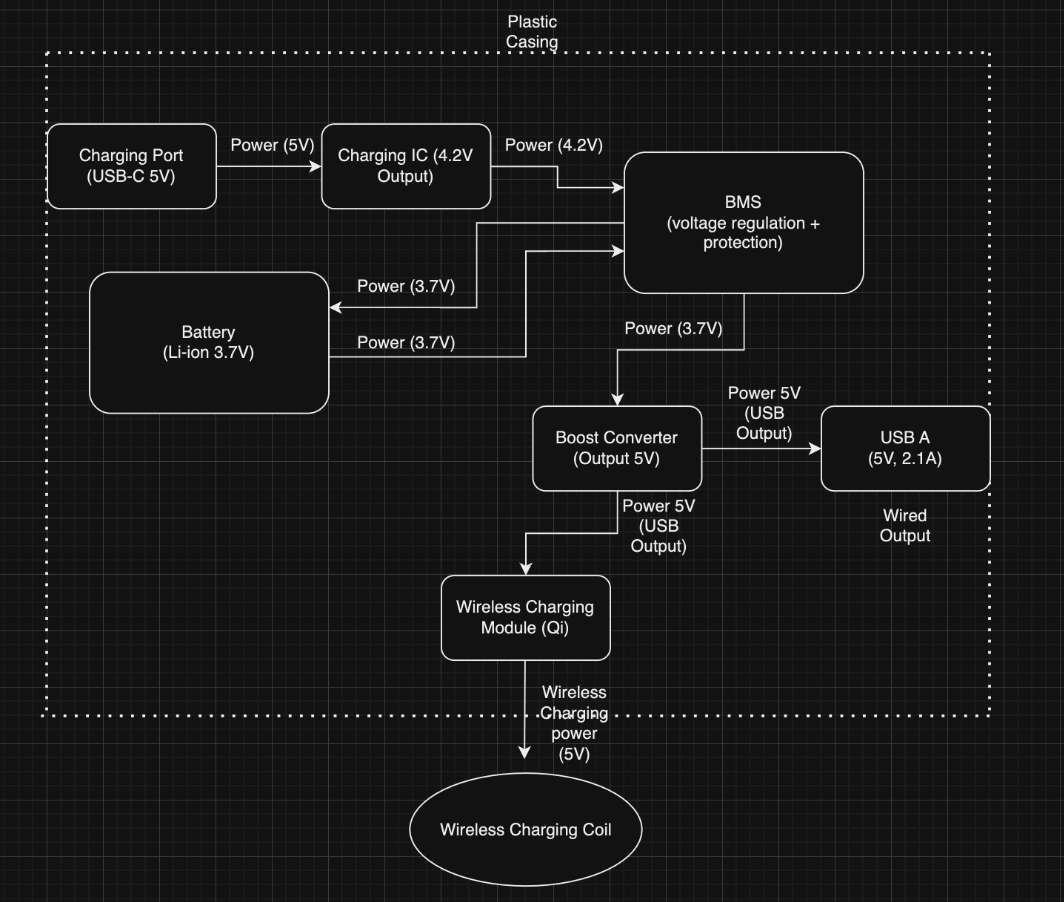
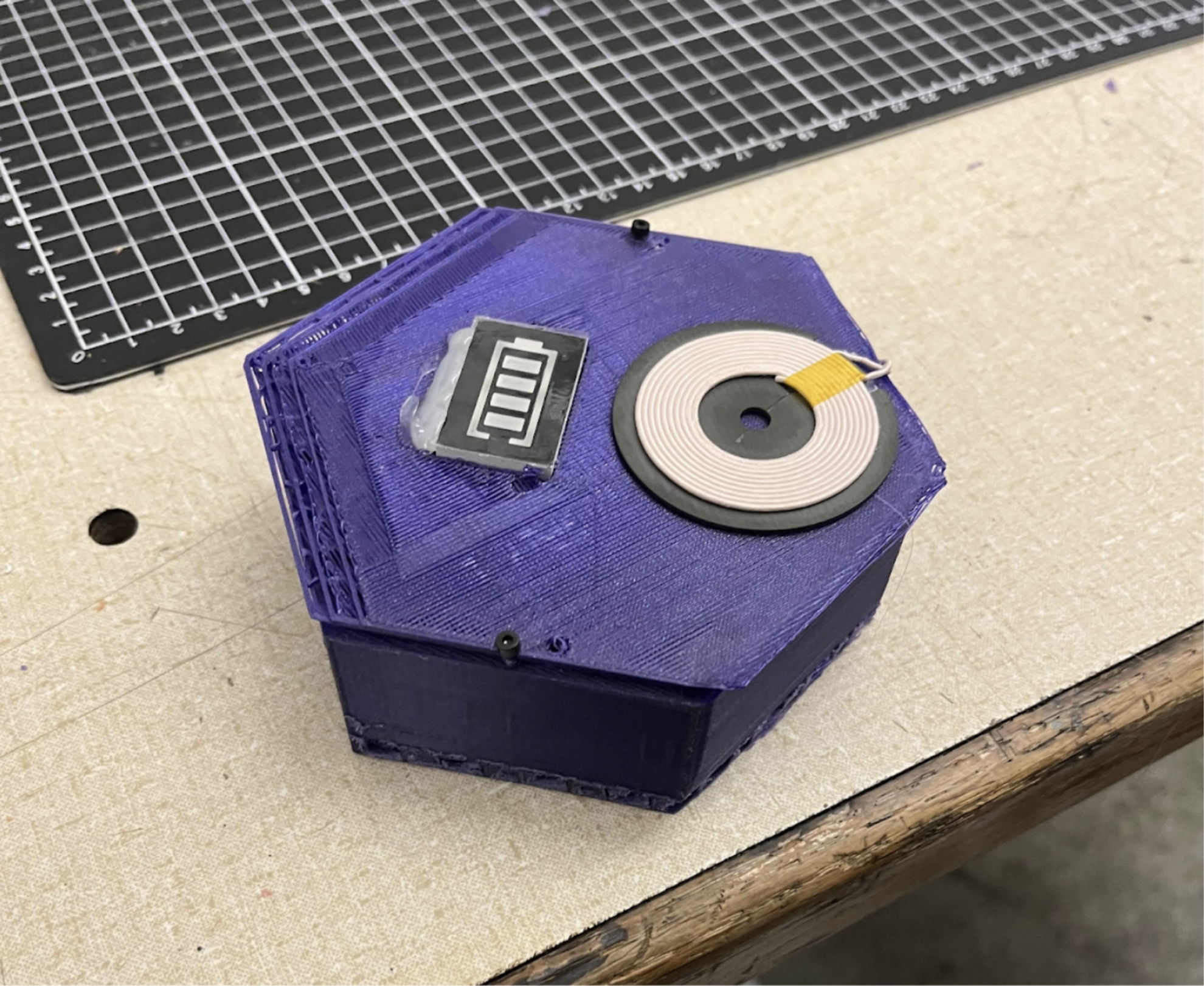
Power / Product
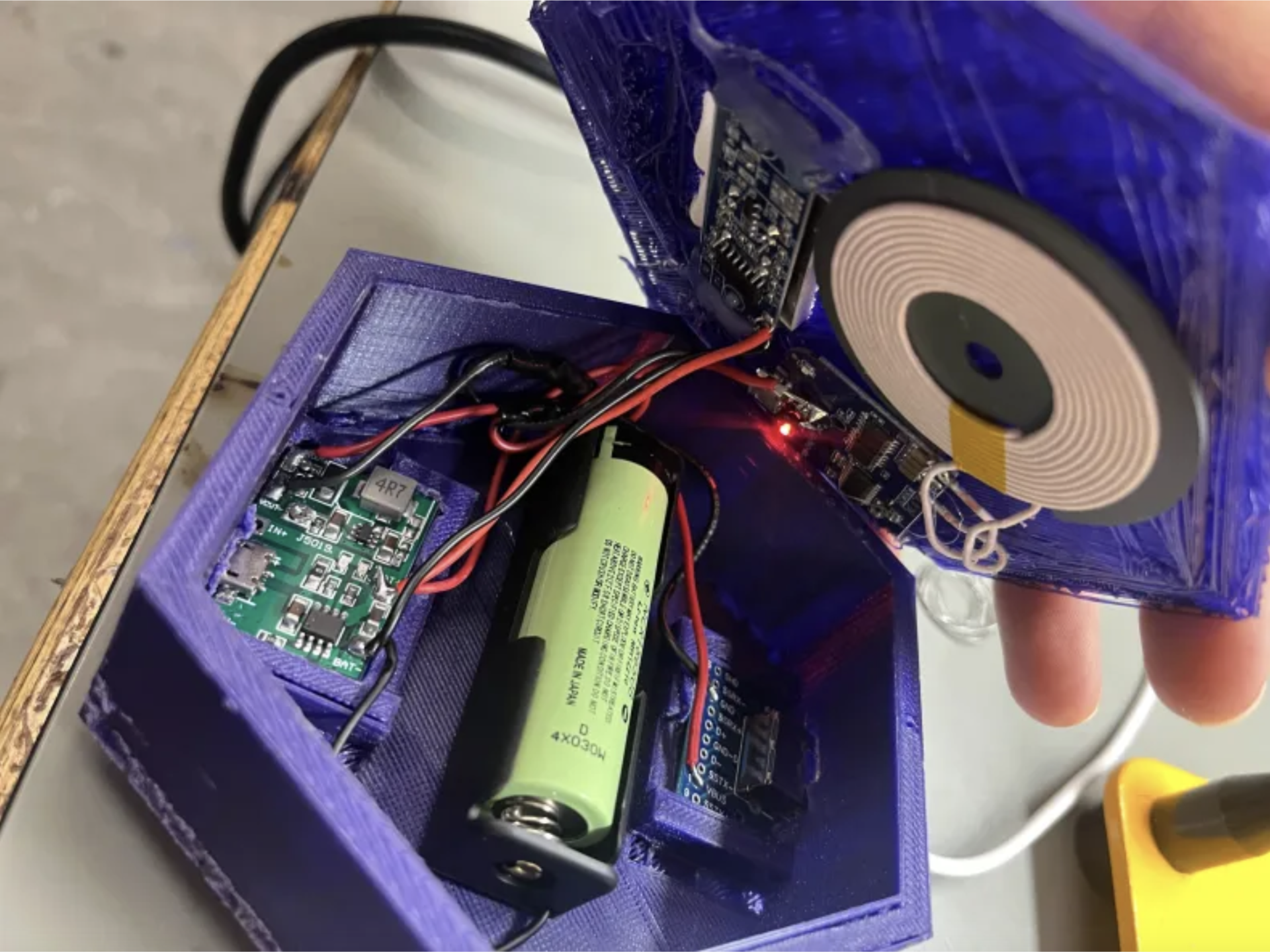
Qi‑enabled bank with BMS/charging IC, LED capacity indicator, and buck/boost regulation.
Digital / FPGA
Extended simple RISC CPU on DE1‑SoC; SystemVerilog + testbenches; top marks across labs.
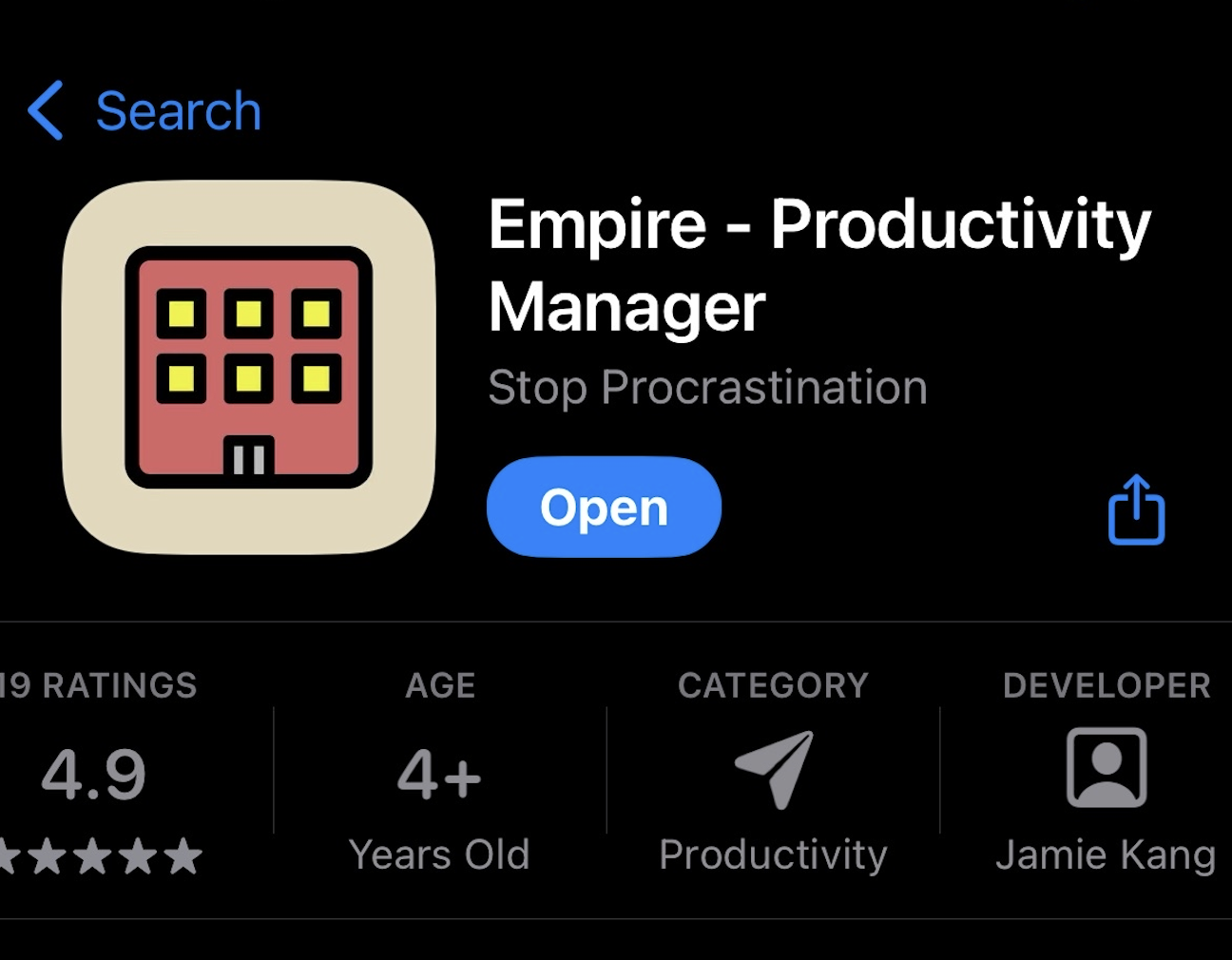
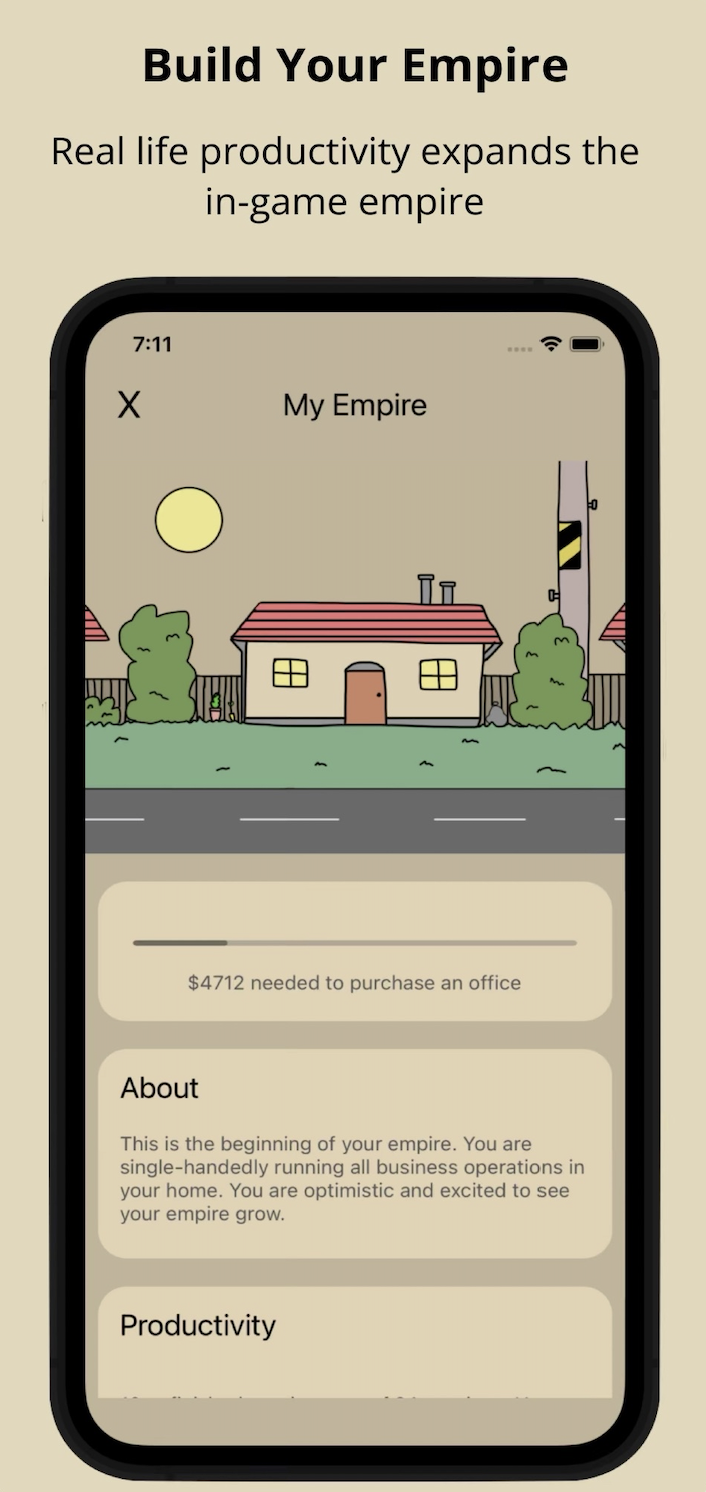
iOS / Software
Launched on App Store; 6,890+ downloads, 4.9★ avg; Swift + Obj‑C for secure state handling.
Controls / Manufacturing
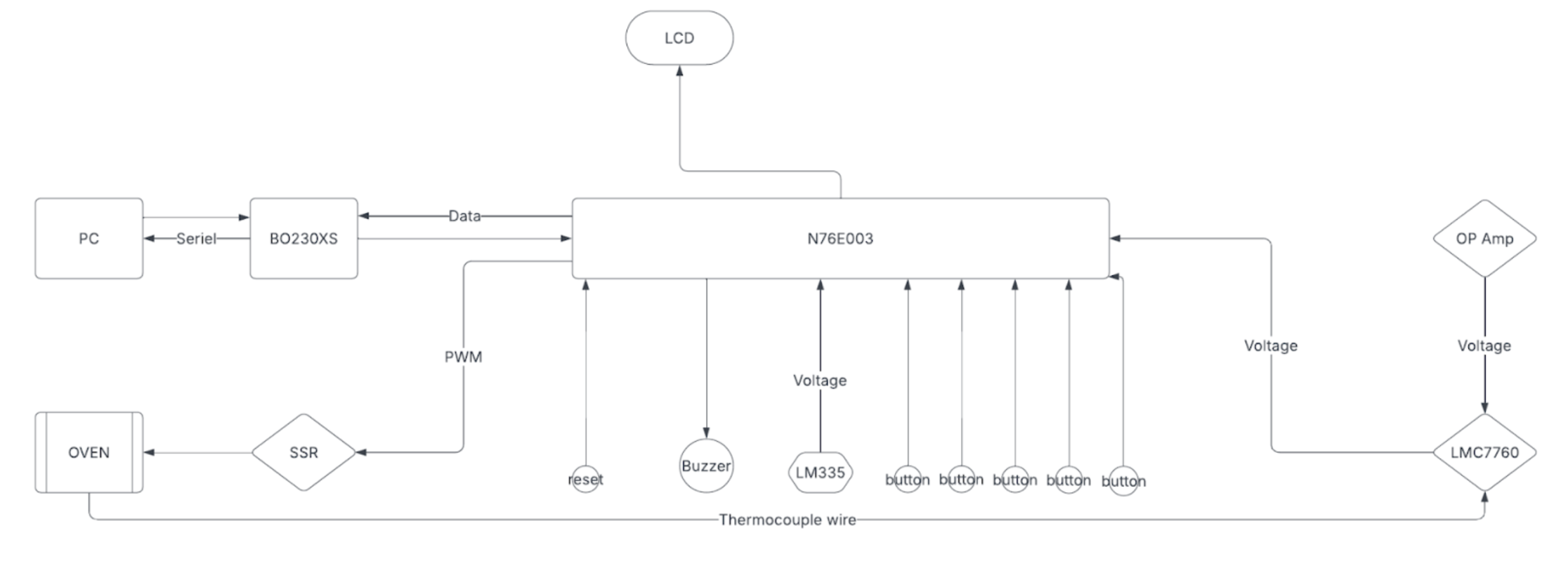
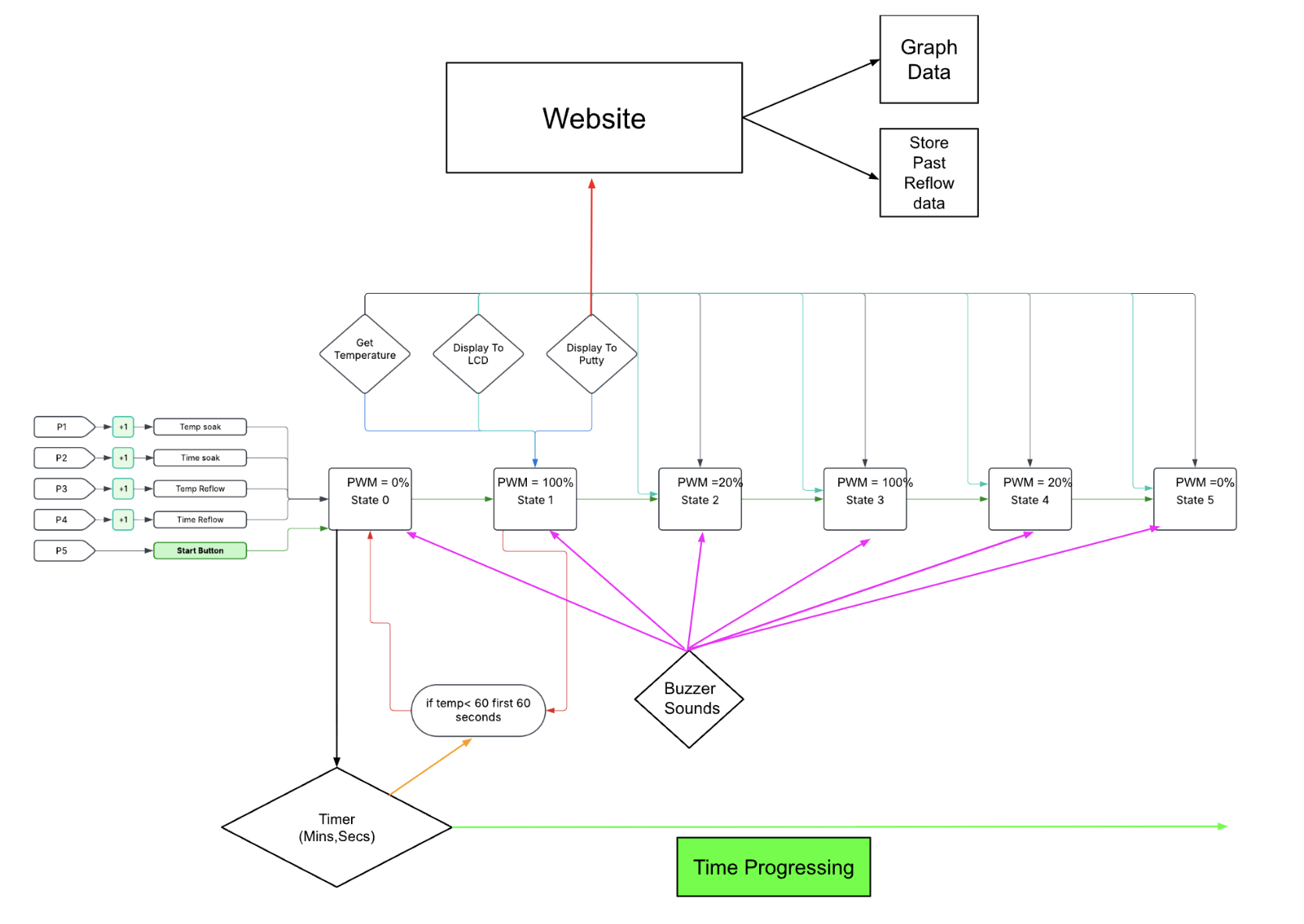
MCU‑based temperature control with K‑type thermocouple + SSR; multi‑stage FSM reflow profiles.
Hello, I’m Jamie, a third-year Electrical Engineering student at UBC. I have a deep appreciation for our technological abundance and wish to work on hardware, the essential layer that makes truly transformative products possible. Aside from engineering work, I spend my time learning the humanities, exercising, and walking in nature. I thrive in collaborative and lively workspaces, and I am open to new opportunities where I can contribute meaningfully. If my work interests you, I’d be glad to connect!
High-current synchronous buck used in robotics power distribution. Focus areas: thermal management and efficiency across load.
Tech: Altium, LM5116, DMM, Oscilloscope, Electronic load
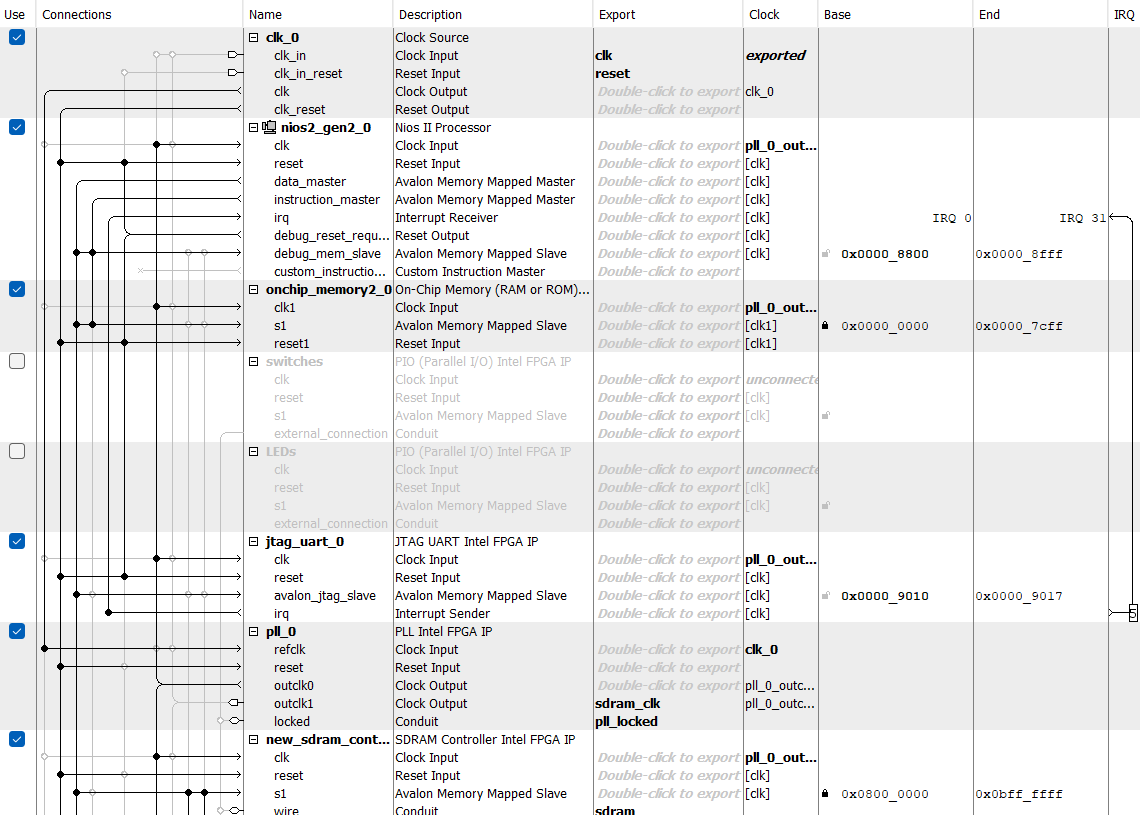
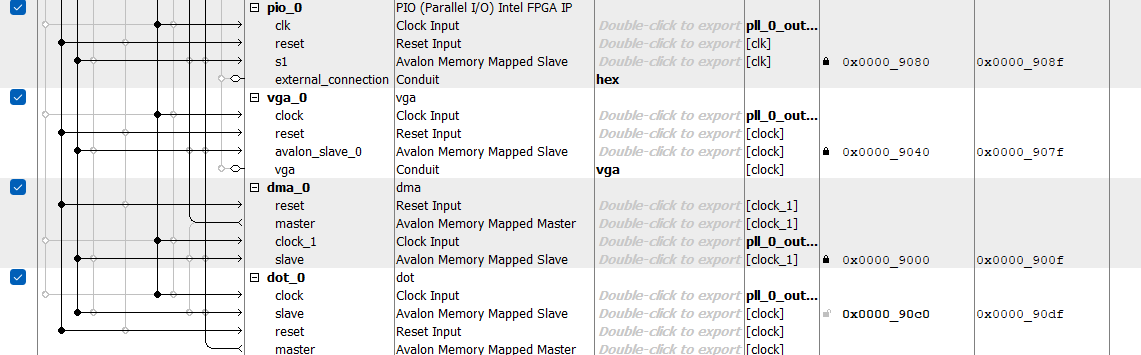
Designed for DE1‑SoC FPGA platform with custom accelerators connected to Avalon bus. Implemented DMA, dot‑product acceleration, SDRAM controller, and VGA visualization, with automated testbenches.
Tech: Verilog, Quartus, ModelSim, Avalon, SDRAM, VGA
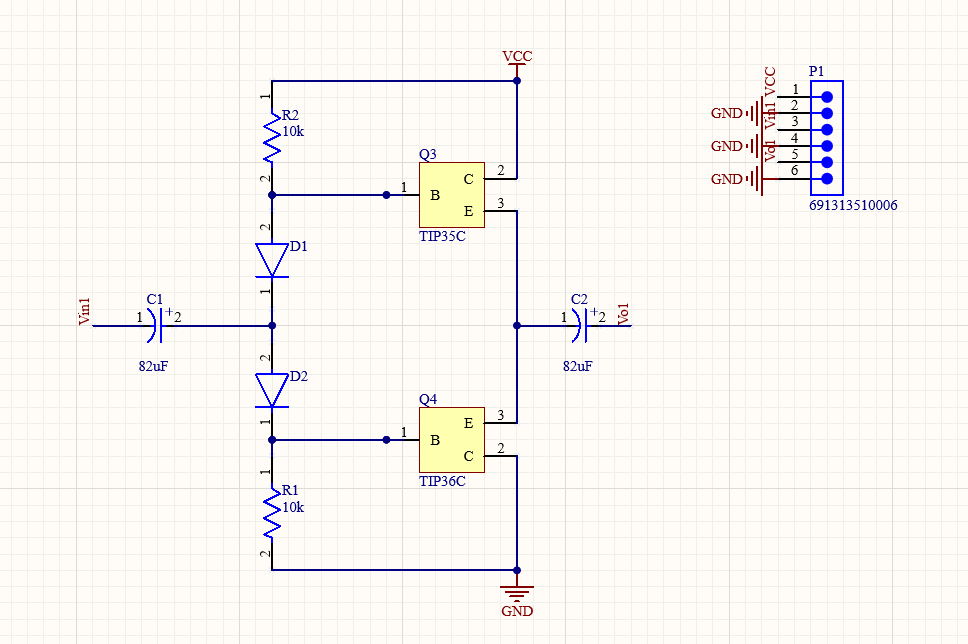
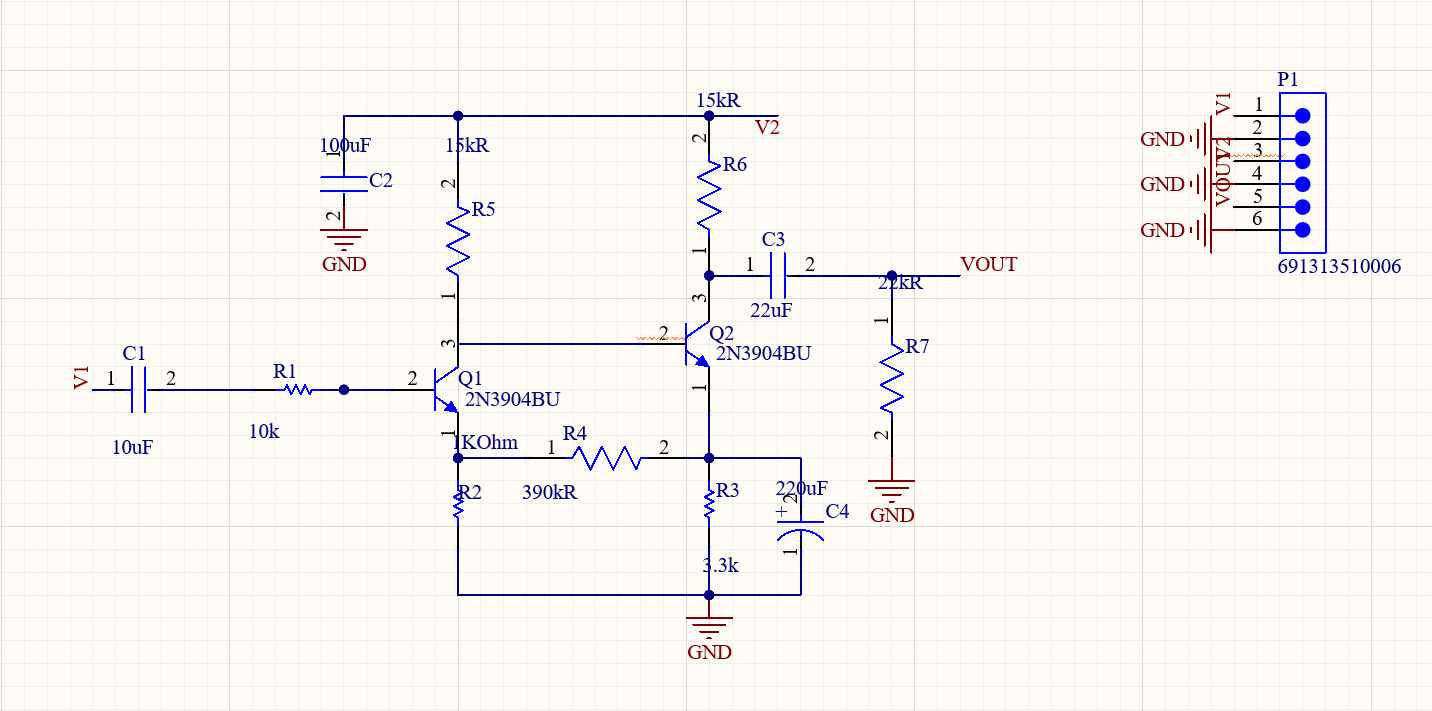
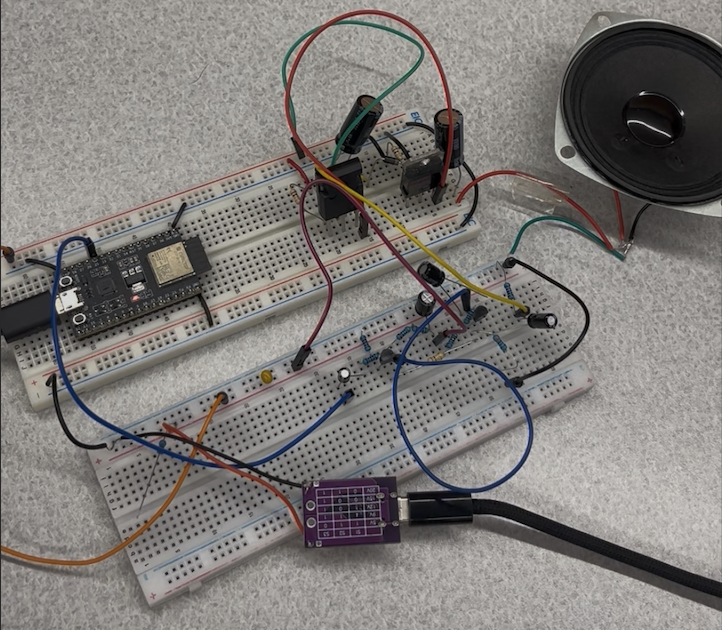
Custom Class‑AB audio amplifier with preamp and tone control. ESP32 handles Bluetooth streaming and UI.
Tech: Class‑AB, ESP32, A2DP, PCB layout, Audio measurement
Built a PIC32‑based autonomous robot with a custom metal‑detector front end and dual MG90S servos.
Tech: PIC32, MG90S, RF link, STM32, LCD, C

Qi‑enabled power bank featuring a BMS and charging IC for safe operation, LED battery capacity display, and a buck/boost converter regulating between USB‑C (in) and USB‑A (out).
Tech: Qi, BMS, USB‑C, Buck/Boost, Thermal
October 2024 – November 2024. Designed and implemented an extended simple RISC machine CPU on the DE1‑SoC. Achieved top scores on all labs, demonstrating proficiency in microprocessor architecture.
Tech: SystemVerilog, ModelSim, Quartus, DE1‑SoC
August 2022 – Present. Developed and launched on the iOS App Store using Swift; 7,670+ downloads, 4.9/5 average rating.
Tech: Swift, Objective‑C, iOS, App Store Connect
Designed and programmed a microcontroller‑based system (Assembly) for precise temperature control using a K‑type thermocouple and SSR. Implemented an FSM for multi‑stage reflow profiles and safety checks; built a dynamic website (HTML/CSS/JS) with Python graphing (Matplotlib/Pandas) for real‑time visualization.
Tech: Assembly, SSR, K‑type, HTML/CSS/JS, Python, Matplotlib, Pandas